#include <IPidMotorController.h>
 Inheritance diagram for subzero::IPidMotorController:
Inheritance diagram for subzero::IPidMotorController: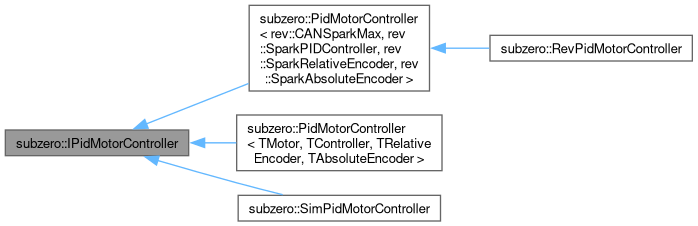 Collaboration diagram for subzero::IPidMotorController:
Collaboration diagram for subzero::IPidMotorController: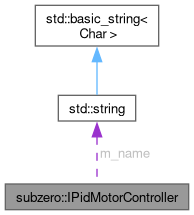
Public Member Functions | |
| IPidMotorController (std::string name) | |
| virtual void | Set (double percentage)=0 |
| virtual void | Set (units::volt_t volts)=0 |
| virtual void | SetPidTolerance (double tolerance)=0 |
| virtual void | Update (void)=0 |
| virtual void | RunWithVelocity (units::revolutions_per_minute_t rpm)=0 |
| virtual void | RunWithVelocity (double percentage)=0 |
| virtual void | RunToPosition (double position)=0 |
| virtual void | ResetEncoder (void)=0 |
| virtual double | GetEncoderPosition (void)=0 |
| virtual std::optional< double > | GetAbsoluteEncoderPosition (void)=0 |
| virtual void | SetEncoderConversionFactor (double factor)=0 |
| virtual void | SetAbsoluteEncoderConversionFactor (double factor)=0 |
| virtual void | Stop (void)=0 |
| virtual const PidSettings & | GetPidSettings (void)=0 |
| virtual void | UpdatePidSettings (PidSettings settings)=0 |
Public Attributes | |
| const std::string | m_name |
Detailed Description
Definition at line 17 of file IPidMotorController.h.
Constructor & Destructor Documentation
◆ IPidMotorController()
|
inlineexplicit |
Definition at line 19 of file IPidMotorController.h.
Member Function Documentation
◆ GetAbsoluteEncoderPosition()
|
pure virtual |
Implemented in subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder, TPidConfig >, subzero::PidMotorController< rev::spark::SparkMax, rev::spark::SparkClosedLoopController, rev::spark::SparkRelativeEncoder, rev::spark::SparkAbsoluteEncoder, rev::spark::SparkMaxConfig >, subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder >, and subzero::SimPidMotorController.
◆ GetEncoderPosition()
|
pure virtual |
Implemented in subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder, TPidConfig >, subzero::PidMotorController< rev::spark::SparkMax, rev::spark::SparkClosedLoopController, rev::spark::SparkRelativeEncoder, rev::spark::SparkAbsoluteEncoder, rev::spark::SparkMaxConfig >, subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder >, and subzero::SimPidMotorController.
◆ GetPidSettings()
|
pure virtual |
Implemented in subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder, TPidConfig >, subzero::PidMotorController< rev::spark::SparkMax, rev::spark::SparkClosedLoopController, rev::spark::SparkRelativeEncoder, rev::spark::SparkAbsoluteEncoder, rev::spark::SparkMaxConfig >, subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder >, and subzero::SimPidMotorController.
◆ ResetEncoder()
|
pure virtual |
Implemented in subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder, TPidConfig >, subzero::PidMotorController< rev::spark::SparkMax, rev::spark::SparkClosedLoopController, rev::spark::SparkRelativeEncoder, rev::spark::SparkAbsoluteEncoder, rev::spark::SparkMaxConfig >, subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder >, and subzero::SimPidMotorController.
◆ RunToPosition()
|
pure virtual |
Implemented in subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder, TPidConfig >, subzero::PidMotorController< rev::spark::SparkMax, rev::spark::SparkClosedLoopController, rev::spark::SparkRelativeEncoder, rev::spark::SparkAbsoluteEncoder, rev::spark::SparkMaxConfig >, subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder >, and subzero::SimPidMotorController.
◆ RunWithVelocity() [1/2]
|
pure virtual |
Implemented in subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder, TPidConfig >, subzero::PidMotorController< rev::spark::SparkMax, rev::spark::SparkClosedLoopController, rev::spark::SparkRelativeEncoder, rev::spark::SparkAbsoluteEncoder, rev::spark::SparkMaxConfig >, subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder >, and subzero::SimPidMotorController.
◆ RunWithVelocity() [2/2]
|
pure virtual |
Implemented in subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder, TPidConfig >, subzero::PidMotorController< rev::spark::SparkMax, rev::spark::SparkClosedLoopController, rev::spark::SparkRelativeEncoder, rev::spark::SparkAbsoluteEncoder, rev::spark::SparkMaxConfig >, subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder >, and subzero::SimPidMotorController.
◆ Set() [1/2]
|
pure virtual |
Implemented in subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder, TPidConfig >, subzero::PidMotorController< rev::spark::SparkMax, rev::spark::SparkClosedLoopController, rev::spark::SparkRelativeEncoder, rev::spark::SparkAbsoluteEncoder, rev::spark::SparkMaxConfig >, subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder >, and subzero::SimPidMotorController.
◆ Set() [2/2]
|
pure virtual |
Implemented in subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder, TPidConfig >, subzero::PidMotorController< rev::spark::SparkMax, rev::spark::SparkClosedLoopController, rev::spark::SparkRelativeEncoder, rev::spark::SparkAbsoluteEncoder, rev::spark::SparkMaxConfig >, subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder >, and subzero::SimPidMotorController.
◆ SetAbsoluteEncoderConversionFactor()
|
pure virtual |
Implemented in subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder, TPidConfig >, subzero::PidMotorController< rev::spark::SparkMax, rev::spark::SparkClosedLoopController, rev::spark::SparkRelativeEncoder, rev::spark::SparkAbsoluteEncoder, rev::spark::SparkMaxConfig >, subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder >, and subzero::SimPidMotorController.
◆ SetEncoderConversionFactor()
|
pure virtual |
Implemented in subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder, TPidConfig >, subzero::PidMotorController< rev::spark::SparkMax, rev::spark::SparkClosedLoopController, rev::spark::SparkRelativeEncoder, rev::spark::SparkAbsoluteEncoder, rev::spark::SparkMaxConfig >, subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder >, and subzero::SimPidMotorController.
◆ SetPidTolerance()
|
pure virtual |
Implemented in subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder, TPidConfig >, subzero::PidMotorController< rev::spark::SparkMax, rev::spark::SparkClosedLoopController, rev::spark::SparkRelativeEncoder, rev::spark::SparkAbsoluteEncoder, rev::spark::SparkMaxConfig >, subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder >, and subzero::SimPidMotorController.
◆ Stop()
|
pure virtual |
Implemented in subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder, TPidConfig >, subzero::PidMotorController< rev::spark::SparkMax, rev::spark::SparkClosedLoopController, rev::spark::SparkRelativeEncoder, rev::spark::SparkAbsoluteEncoder, rev::spark::SparkMaxConfig >, subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder >, and subzero::SimPidMotorController.
◆ Update()
|
pure virtual |
Implemented in subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder, TPidConfig >, subzero::PidMotorController< rev::spark::SparkMax, rev::spark::SparkClosedLoopController, rev::spark::SparkRelativeEncoder, rev::spark::SparkAbsoluteEncoder, rev::spark::SparkMaxConfig >, subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder >, and subzero::SimPidMotorController.
◆ UpdatePidSettings()
|
pure virtual |
Implemented in subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder, TPidConfig >, subzero::PidMotorController< rev::spark::SparkMax, rev::spark::SparkClosedLoopController, rev::spark::SparkRelativeEncoder, rev::spark::SparkAbsoluteEncoder, rev::spark::SparkMaxConfig >, subzero::PidMotorController< TMotor, TController, TRelativeEncoder, TAbsoluteEncoder >, and subzero::SimPidMotorController.
Member Data Documentation
◆ m_name
| const std::string subzero::IPidMotorController::m_name |
Definition at line 37 of file IPidMotorController.h.
The documentation for this class was generated from the following file:
- include/subzero/motor/IPidMotorController.h